This project aimed to control a string marionette by robotic means.
Just guess which puppet is controlled by a robot?
The following video explores the possibilities of movement for a robot controled string marionette.
An even simpler but likewise compelling setting is offered by a jointed doll operated by a single string.
At last a short demonstration of the groundstanding operations of the robotic arm.
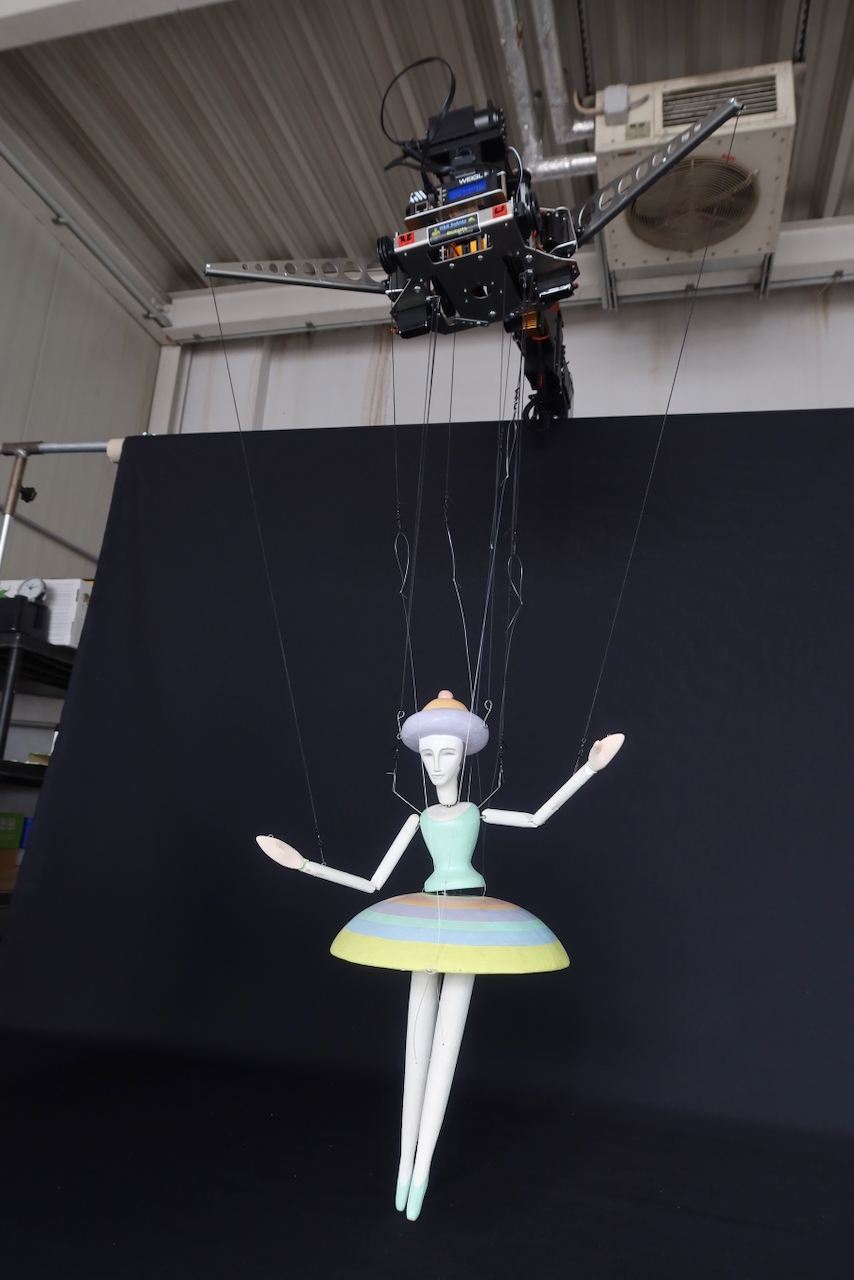
MARIONETTE 4.0
Production: stellwerk junges theater, Germany
Director: Christian Fuchs, Germany
Robotic Arm: ROBOTIS OpenManipulator-P, South Korea
Servo Unit: H&S Robots, Ben Schaefer, Germany
Control Software: Conductor, WeiglControl, Austria
Control Hardware: Pro I/O 16 WeiglControl, Austria
Funded by: Kulturstiftung des Freistaats Thüringen, Germany
Part B
Jointed doll, replika of a toy doll designed by Oskar Schlemmer 1925
Part C
„Rundrock“ Dancer, marionette version by Marianne & Kurt Erbe after „Triacic Ballet“ by Oskar Schlemmer 1922
Part D
„Rundrock“ & „Taucher“ Dancer, marionette version by Marianne & Kurt Erbe after „Triacic Ballet“ by Oskar Schlemmer 1922
Previous version: Marionette 3.0
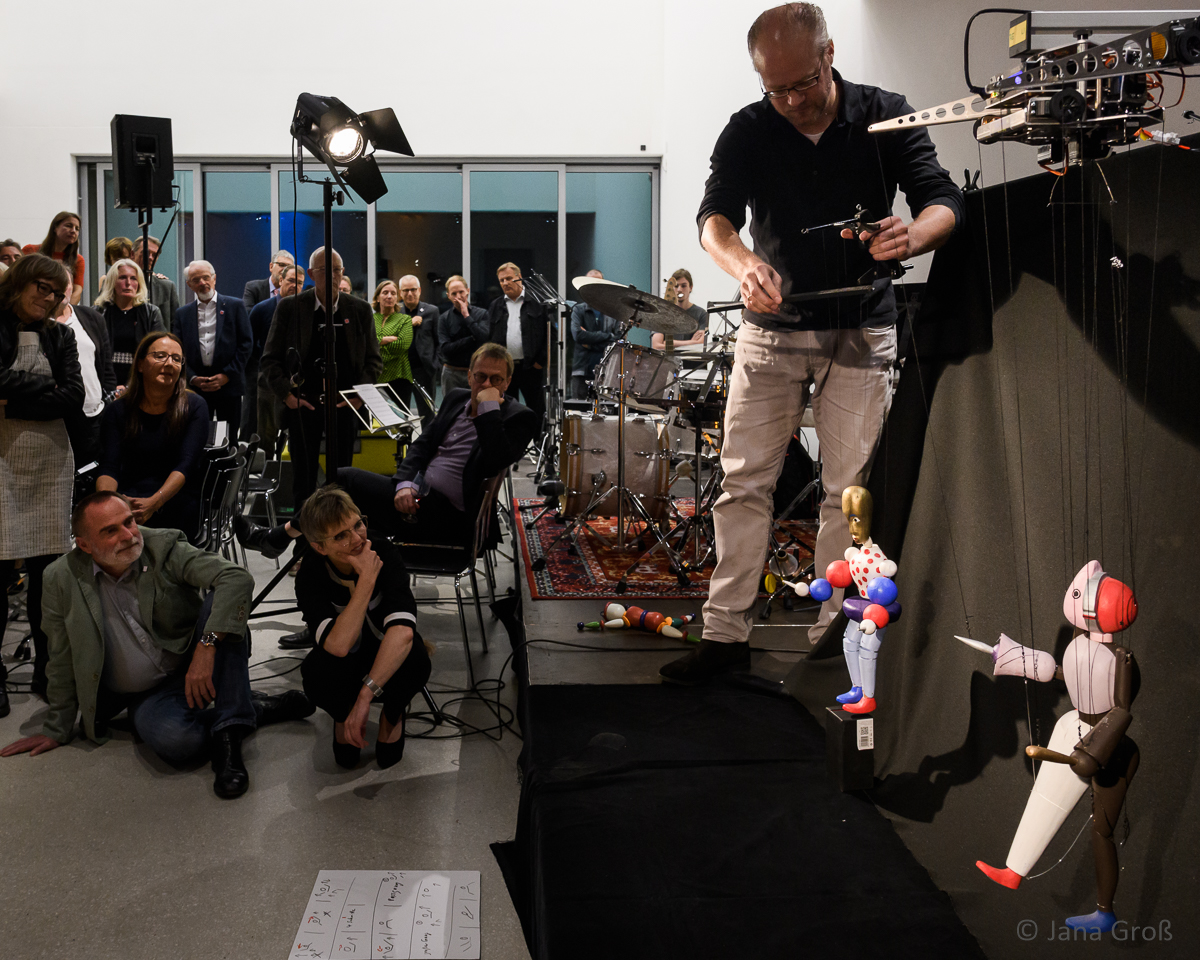
At the Bauhaus-Museum Weimar
Another duett of two marionettes. In this stage without the robotic arm. Supporter of the Verein Bauhaus.Weimar.Moderne enjoying the lecture performance by Christian Fuchs.
Schön war es!
Marionette 3.0 „Abstrakter“ dancing.
Elements of marionette 3.0
At the top the servo unit by H&S Robots Ben Schaefer.
Controled via WeiglControl.
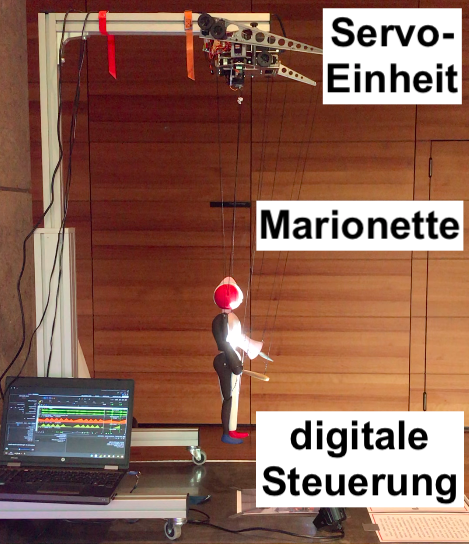
Production: stellwerk junges theater.
Funded by: Staatskanzlei Thüringen.
Marionette 3.0 dancing on an exhibition in Berlin, Germany
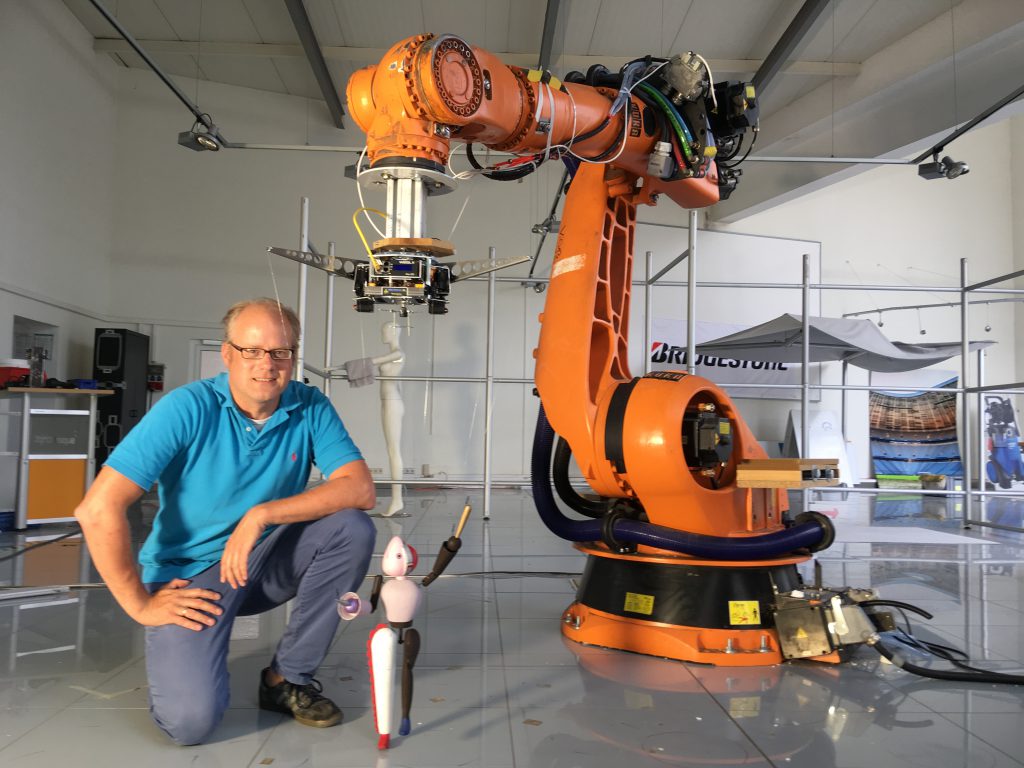
Just a oportunity for a picture: marionette connected with a giant KUKA industrial robot. They never danced together – what a pitty.
Early sketch visualizing the project.